Fast Nonlinear Buckling Solver
Benchmarking Awatif Against Abaqus
1Introduction
Nonlinear buckling analysis is important for slender and lightweight structures, where large displacements and second-order effects can strongly influence the response. However, nonlinear simulations can be slow, difficult to converge, and expensive to run in practical engineering workflows.
Awatif introduces a new class of nonlinear solvers that is an order of magnitude faster than conventional FEM-based methods.
This white paper benchmarks Awatif's nonlinear solver against Abaqus on three buckling-sensitive problems. The comparison focuses on displacement accuracy, solver iterations, and convergence behavior.
The goal is to evaluate whether Awatif can produce comparable nonlinear results while reducing computational effort on the tested benchmark cases.
2Benchmark Cases
All three benchmark cases are modeled using frame elements.
3Accuracy
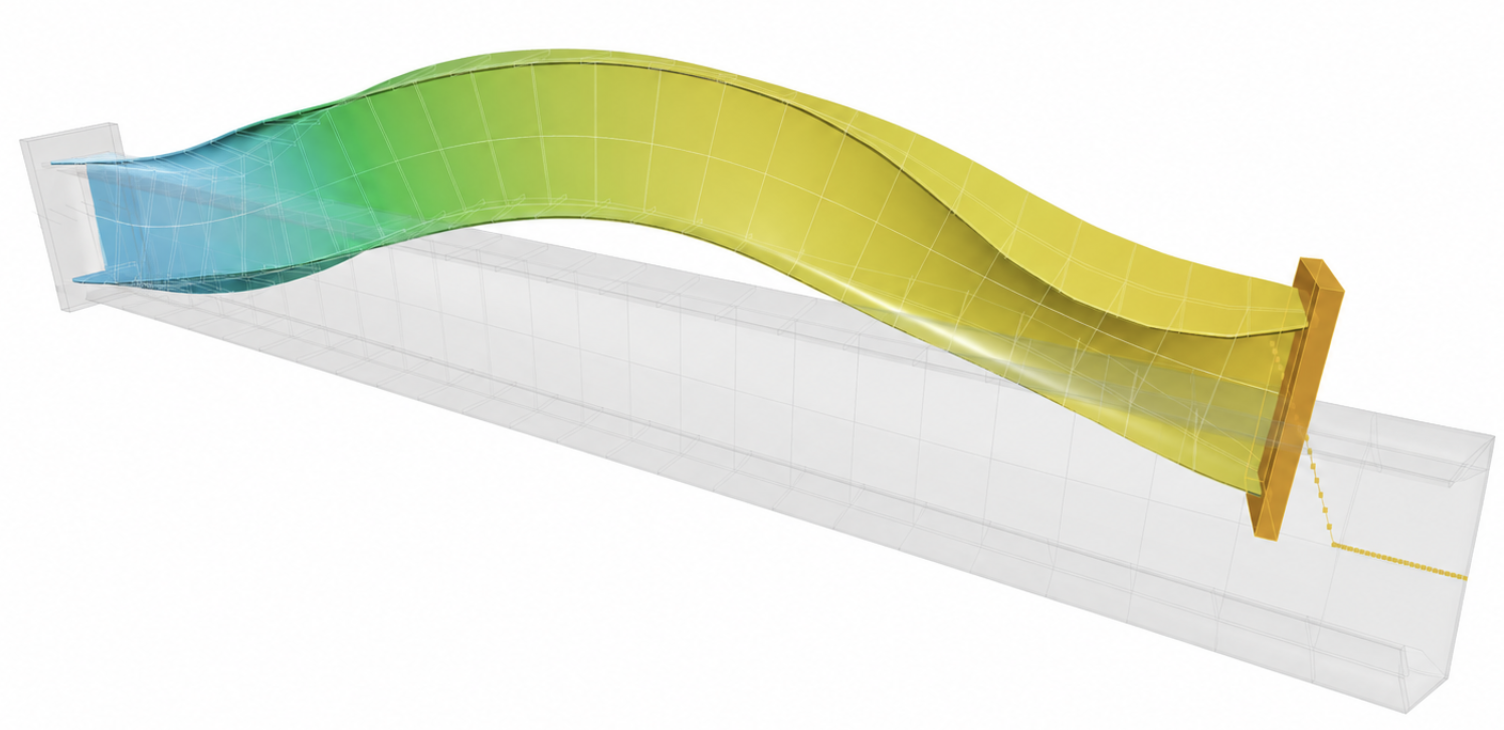
Accuracy is evaluated by comparing key displacement results from Abaqus and Awatif. For the cantilever column and portal frame, the compared value is the global X displacement at the loaded point. For the clamped-clamped IPE 300 column, the compared value is the maximum global Z displacement near mid-span after buckling.
| Case | Compared displacement | Abaqus | Awatif | Difference |
|---|---|---|---|---|
| 1. Cantilever column | Global X at loaded point | 2.212 m | 2.257 m | 2.01% |
| 2. Portal frame | Global X at loaded point | 0.353 m | 0.358 m | 1.57% |
| 3. Clamped-clamped IPE 300 column | Maximum global Z near mid-span | 0.394 m | 0.393 m | 0.33% |
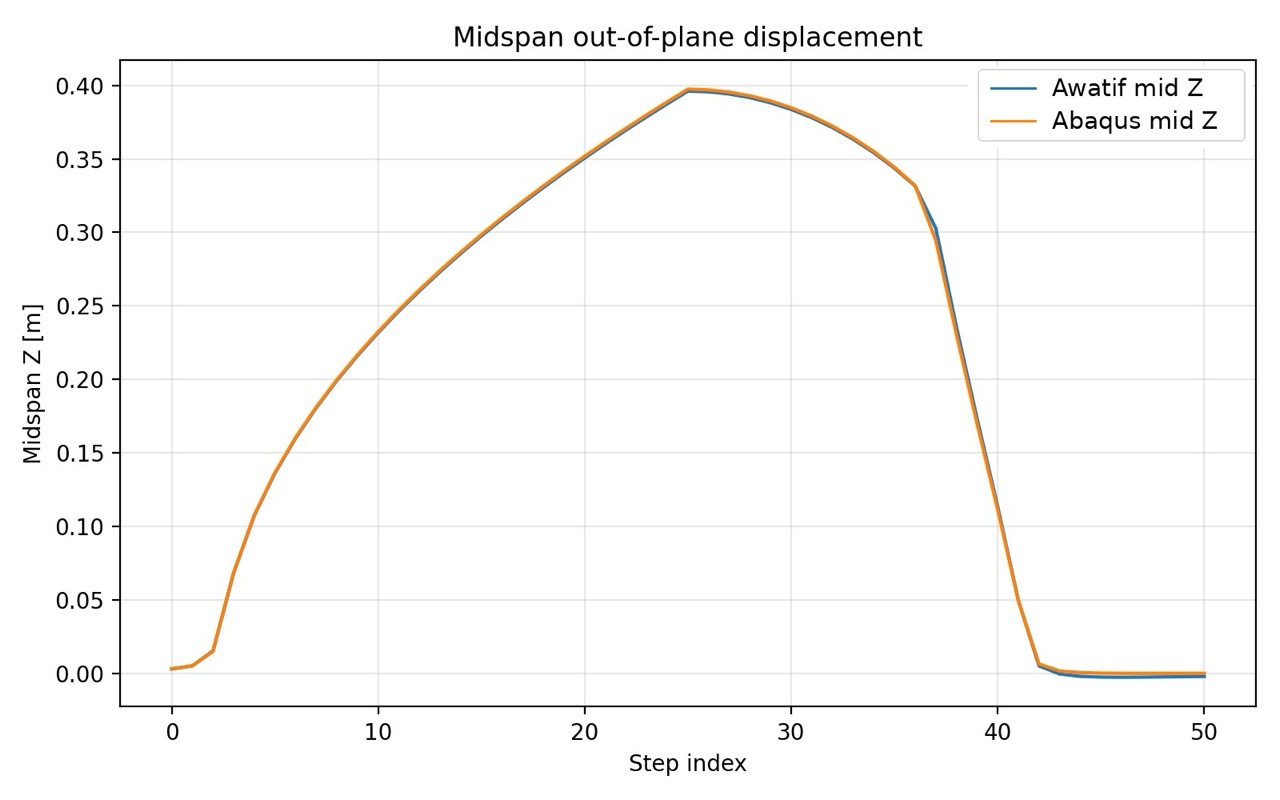
The mid-span out-of-plane displacement history for the IPE 300 column shows close agreement between Awatif and Abaqus throughout the load path. Both solvers capture the growth of the weak-axis buckling displacement, the peak response, and the unloading-like reduction during the lateral displacement phase.
4Performance
Performance is evaluated using two solver quantities: the number of iterations required to reach convergence and the final residual error.
The iteration count indicates the computational effort required by each solver. The final error indicates whether the solution reached the required convergence tolerance.
This comparison avoids hardware-dependent timing results and focuses on solver behavior.
| Case | Abaqus iterations | Awatif iterations | Iteration speedup | Abaqus final error | Awatif final error |
|---|---|---|---|---|---|
| Cantilever column | 38 | 6 | 6.3× | 3.55 × 10-4 | 1.97 × 10-9 |
| Portal frame | 303 | 9 | 33.7× | 9.06 × 10-5 | 4.30 × 10-7 |
| IPE 300 column | 599 | 60 | 10.0× | 8.85 × 10-6 | 3.02 × 10-7 |
5Conclusion
Across the three nonlinear buckling benchmarks, Awatif closely reproduced the Abaqus displacement response, with the reported displacement differences remaining at or below 2.01%. The force-controlled cantilever and portal-frame cases showed the largest efficiency gains, reducing the required solver iterations by 6.3× and 33.7×, respectively. The displacement-controlled IPE 300 column converged more easily, so its relative gain was smaller; nevertheless, 599 to 60 iterations is a 10.0× improvement with the same buckling trend. This marks the beginning of a new paradigm: next, the framework will be extended to shell elements and other nonlinearities, including material nonlinearity.